Customize Data Pipelines¶
Design of Data pipelines¶
Following typical conventions, we use Dataset and DataLoader for data loading
with multiple workers. Dataset returns a dict of data items corresponding
the arguments of models’ forward method.
Since the data in object detection may not be the same size (point number, gt bbox size, etc.),
we introduce a new DataContainer type in MMCV to help collect and distribute
data of different size.
See here for more details.
The data preparation pipeline and the dataset is decomposed. Usually a dataset defines how to process the annotations and a data pipeline defines all the steps to prepare a data dict. A pipeline consists of a sequence of operations. Each operation takes a dict as input and also output a dict for the next transform.
We present a classical pipeline in the following figure. The blue blocks are pipeline operations. With the pipeline going on, each operator can add new keys (marked as green) to the result dict or update the existing keys (marked as orange).
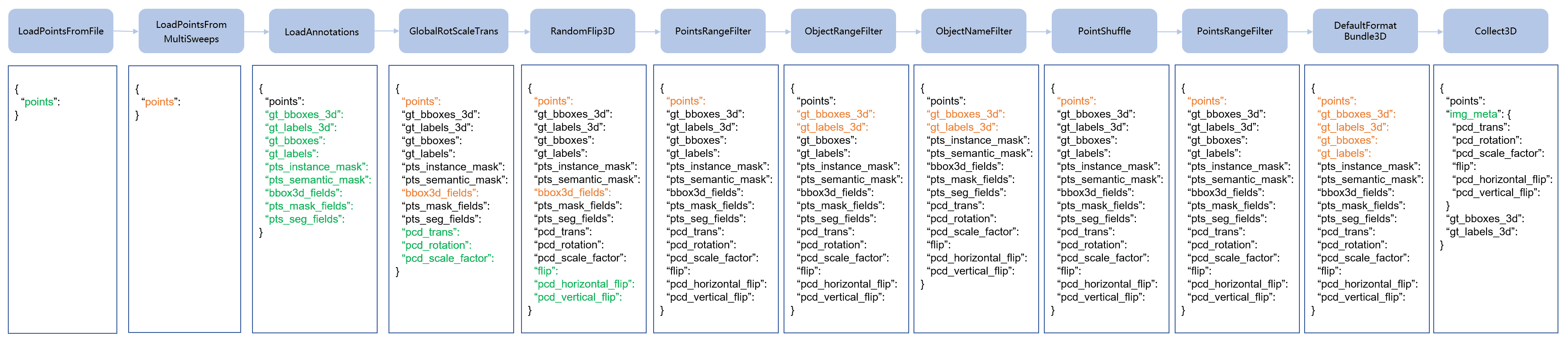
The operations are categorized into data loading, pre-processing, formatting and test-time augmentation.
Here is an pipeline example for PointPillars.
train_pipeline = [
dict(
type='LoadPointsFromFile',
load_dim=5,
use_dim=5,
backend_args=backend_args),
dict(
type='LoadPointsFromMultiSweeps',
sweeps_num=10,
backend_args=backend_args),
dict(type='LoadAnnotations3D', with_bbox_3d=True, with_label_3d=True),
dict(
type='GlobalRotScaleTrans',
rot_range=[-0.3925, 0.3925],
scale_ratio_range=[0.95, 1.05],
translation_std=[0, 0, 0]),
dict(type='RandomFlip3D', flip_ratio_bev_horizontal=0.5),
dict(type='PointsRangeFilter', point_cloud_range=point_cloud_range),
dict(type='ObjectRangeFilter', point_cloud_range=point_cloud_range),
dict(type='ObjectNameFilter', classes=class_names),
dict(type='PointShuffle'),
dict(type='DefaultFormatBundle3D', class_names=class_names),
dict(type='Collect3D', keys=['points', 'gt_bboxes_3d', 'gt_labels_3d'])
]
test_pipeline = [
dict(
type='LoadPointsFromFile',
load_dim=5,
use_dim=5,
backend_args=backend_args),
dict(
type='LoadPointsFromMultiSweeps',
sweeps_num=10,
backend_args=backend_args),
dict(
type='MultiScaleFlipAug',
img_scale=(1333, 800),
pts_scale_ratio=1.0,
flip=False,
pcd_horizontal_flip=False,
pcd_vertical_flip=False,
transforms=[
dict(
type='GlobalRotScaleTrans',
rot_range=[0, 0],
scale_ratio_range=[1., 1.],
translation_std=[0, 0, 0]),
dict(type='RandomFlip3D'),
dict(
type='PointsRangeFilter', point_cloud_range=point_cloud_range),
dict(
type='DefaultFormatBundle3D',
class_names=class_names,
with_label=False),
dict(type='Collect3D', keys=['points'])
])
]
For each operation, we list the related dict fields that are added/updated/removed.
Data loading¶
LoadPointsFromFile
add: points
LoadPointsFromMultiSweeps
update: points
LoadAnnotations3D
add: gt_bboxes_3d, gt_labels_3d, gt_bboxes, gt_labels, pts_instance_mask, pts_semantic_mask, bbox3d_fields, pts_mask_fields, pts_seg_fields
Pre-processing¶
GlobalRotScaleTrans
add: pcd_trans, pcd_rotation, pcd_scale_factor
update: points, *bbox3d_fields
RandomFlip3D
add: flip, pcd_horizontal_flip, pcd_vertical_flip
update: points, *bbox3d_fields
PointsRangeFilter
update: points
ObjectRangeFilter
update: gt_bboxes_3d, gt_labels_3d
ObjectNameFilter
update: gt_bboxes_3d, gt_labels_3d
PointShuffle
update: points
PointsRangeFilter
update: points
Formatting¶
DefaultFormatBundle3D
update: points, gt_bboxes_3d, gt_labels_3d, gt_bboxes, gt_labels
Collect3D
add: img_meta (the keys of img_meta is specified by
meta_keys)remove: all other keys except for those specified by
keys
Test time augmentation¶
MultiScaleFlipAug
update: scale, pcd_scale_factor, flip, flip_direction, pcd_horizontal_flip, pcd_vertical_flip with list of augmented data with these specific parameters
Extend and use custom pipelines¶
Write a new pipeline in any file, e.g.,
my_pipeline.py. It takes a dict as input and return a dict.from mmdet.datasets import PIPELINES @PIPELINES.register_module() class MyTransform: def __call__(self, results): results['dummy'] = True return results
Import the new class.
from .my_pipeline import MyTransform
Use it in config files.
train_pipeline = [ dict( type='LoadPointsFromFile', load_dim=5, use_dim=5, backend_args=backend_args), dict( type='LoadPointsFromMultiSweeps', sweeps_num=10, backend_args=backend_args), dict(type='LoadAnnotations3D', with_bbox_3d=True, with_label_3d=True), dict( type='GlobalRotScaleTrans', rot_range=[-0.3925, 0.3925], scale_ratio_range=[0.95, 1.05], translation_std=[0, 0, 0]), dict(type='RandomFlip3D', flip_ratio_bev_horizontal=0.5), dict(type='PointsRangeFilter', point_cloud_range=point_cloud_range), dict(type='ObjectRangeFilter', point_cloud_range=point_cloud_range), dict(type='ObjectNameFilter', classes=class_names), dict(type='MyTransform'), dict(type='PointShuffle'), dict(type='DefaultFormatBundle3D', class_names=class_names), dict(type='Collect3D', keys=['points', 'gt_bboxes_3d', 'gt_labels_3d']) ]