自定义数据预处理流程¶
数据预处理流程的设计¶
遵循一般惯例,我们使用 Dataset 和 DataLoader 来调用多个进程进行数据的加载。Dataset 将会返回与模型前向传播的参数所对应的数据项构成的字典。因为目标检测中的数据的尺寸可能无法保持一致(如点云中点的数量、真实标注框的尺寸等),我们在 MMCV 中引入一个 DataContainer 类型,来帮助收集和分发不同尺寸的数据。请参考此处获取更多细节。
数据预处理流程和数据集之间是互相分离的两个部分,通常数据集定义了如何处理标注信息,而数据预处理流程定义了准备数据项字典的所有步骤。数据集预处理流程包含一系列的操作,每个操作将一个字典作为输入,并输出应用于下一个转换的一个新的字典。
我们将在下图中展示一个最经典的数据集预处理流程,其中蓝色框表示预处理流程中的各项操作。随着预处理的进行,每一个操作都会添加新的键值(图中标记为绿色)到输出字典中,或者更新当前存在的键值(图中标记为橙色)。
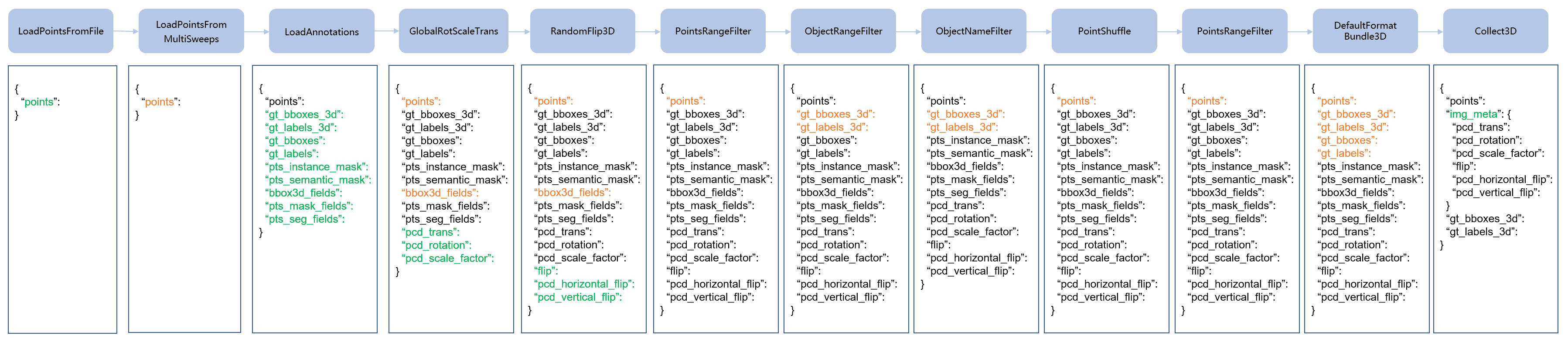
预处理流程中的各项操作主要分为数据加载、预处理、格式化、测试时的数据增强。
接下来将展示一个用于 PointPillars 模型的数据集预处理流程的例子。
train_pipeline = [
dict(
type='LoadPointsFromFile',
load_dim=5,
use_dim=5,
backend_args=backend_args),
dict(
type='LoadPointsFromMultiSweeps',
sweeps_num=10,
backend_args=backend_args),
dict(type='LoadAnnotations3D', with_bbox_3d=True, with_label_3d=True),
dict(
type='GlobalRotScaleTrans',
rot_range=[-0.3925, 0.3925],
scale_ratio_range=[0.95, 1.05],
translation_std=[0, 0, 0]),
dict(type='RandomFlip3D', flip_ratio_bev_horizontal=0.5),
dict(type='PointsRangeFilter', point_cloud_range=point_cloud_range),
dict(type='ObjectRangeFilter', point_cloud_range=point_cloud_range),
dict(type='ObjectNameFilter', classes=class_names),
dict(type='PointShuffle'),
dict(type='DefaultFormatBundle3D', class_names=class_names),
dict(type='Collect3D', keys=['points', 'gt_bboxes_3d', 'gt_labels_3d'])
]
test_pipeline = [
dict(
type='LoadPointsFromFile',
load_dim=5,
use_dim=5,
backend_args=backend_args),
dict(
type='LoadPointsFromMultiSweeps',
sweeps_num=10,
backend_args=backend_args),
dict(
type='MultiScaleFlipAug',
img_scale=(1333, 800),
pts_scale_ratio=1.0,
flip=False,
pcd_horizontal_flip=False,
pcd_vertical_flip=False,
transforms=[
dict(
type='GlobalRotScaleTrans',
rot_range=[0, 0],
scale_ratio_range=[1., 1.],
translation_std=[0, 0, 0]),
dict(type='RandomFlip3D'),
dict(
type='PointsRangeFilter', point_cloud_range=point_cloud_range),
dict(
type='DefaultFormatBundle3D',
class_names=class_names,
with_label=False),
dict(type='Collect3D', keys=['points'])
])
]
对于每项操作,我们将列出相关的被添加/更新/移除的字典项。
数据加载¶
LoadPointsFromFile
添加:points
LoadPointsFromMultiSweeps
更新:points
LoadAnnotations3D
添加:gt_bboxes_3d, gt_labels_3d, gt_bboxes, gt_labels, pts_instance_mask, pts_semantic_mask, bbox3d_fields, pts_mask_fields, pts_seg_fields
预处理¶
GlobalRotScaleTrans
添加:pcd_trans, pcd_rotation, pcd_scale_factor
更新:points, *bbox3d_fields
RandomFlip3D
添加:flip, pcd_horizontal_flip, pcd_vertical_flip
更新:points, *bbox3d_fields
PointsRangeFilter
更新:points
ObjectRangeFilter
更新:gt_bboxes_3d, gt_labels_3d
ObjectNameFilter
更新:gt_bboxes_3d, gt_labels_3d
PointShuffle
更新:points
PointsRangeFilter
更新:points
格式化¶
DefaultFormatBundle3D
更新:points, gt_bboxes_3d, gt_labels_3d, gt_bboxes, gt_labels
Collect3D
添加:img_meta (由
meta_keys指定的键值构成的 img_meta)移除:所有除
keys指定的键值以外的其他键值
测试时的数据增强¶
MultiScaleFlipAug
更新: scale, pcd_scale_factor, flip, flip_direction, pcd_horizontal_flip, pcd_vertical_flip (与这些指定的参数对应的增强后的数据列表)
扩展并使用自定义数据集预处理方法¶
在任意文件中写入新的数据集预处理方法,如
my_pipeline.py,该预处理方法的输入和输出均为字典from mmdet.datasets import PIPELINES @PIPELINES.register_module() class MyTransform: def __call__(self, results): results['dummy'] = True return results
导入新的预处理方法类
from .my_pipeline import MyTransform
在配置文件中使用该数据集预处理方法
train_pipeline = [ dict( type='LoadPointsFromFile', load_dim=5, use_dim=5, backend_args=backend_args), dict( type='LoadPointsFromMultiSweeps', sweeps_num=10, backend_args=backend_args), dict(type='LoadAnnotations3D', with_bbox_3d=True, with_label_3d=True), dict( type='GlobalRotScaleTrans', rot_range=[-0.3925, 0.3925], scale_ratio_range=[0.95, 1.05], translation_std=[0, 0, 0]), dict(type='RandomFlip3D', flip_ratio_bev_horizontal=0.5), dict(type='PointsRangeFilter', point_cloud_range=point_cloud_range), dict(type='ObjectRangeFilter', point_cloud_range=point_cloud_range), dict(type='ObjectNameFilter', classes=class_names), dict(type='MyTransform'), dict(type='PointShuffle'), dict(type='DefaultFormatBundle3D', class_names=class_names), dict(type='Collect3D', keys=['points', 'gt_bboxes_3d', 'gt_labels_3d']) ]